
The International Marine Robotics and Autonomy Workshop, hosted by SINTEF Ocean on 28 May 2026, brought together leading researchers, technology companies, and innovators to explore the future of marine autonomy, robotics, and ocean technology.
The workshop highlighted a clear direction for the industry: underwater systems are becoming more autonomous, more connected, and more capable of operating in complex environments. From environmental monitoring and offshore operations to aquaculture, seabed mapping, and maritime safety, the need for reliable underwater perception is growing rapidly.
For Water Linked, the event was an opportunity to demonstrate how compact, real-time 3D sonar can support this development and make advanced underwater awareness more accessible for ROVs, AUVs, and other marine robotic systems.

Enabling autonomy through underwater perception
A recurring theme throughout the workshop was the challenge of operating in underwater environments where visibility is limited, conditions change quickly, and reliable positioning and perception are critical.
Representing Water Linked, Alejandro Basauri presented the company’s rapid growth and the role of compact, lightweight, and cost-effective sensors in accelerating marine robotics. He then focused on the Water Linked Sonar 3D-15, showing how real-time 3D underwater perception from a small sensor can help vehicles understand their surroundings and operate with greater confidence.
The Sonar 3D-15 is designed to give underwater vehicles a live 3D view of their environment, even when cameras are limited by darkness, turbidity, or poor visibility. This capability is particularly important for autonomy, where systems need to detect structures, obstacles, and movement in real time.
During the Q&A session, the response from the audience reflected strong interest in the technology. One attendee remarked:
“There is nobody here that isn’t impressed by your sensor.”
For Water Linked, this feedback reinforced the importance of making high-performance underwater perception practical, compact, and accessible for the next generation of marine robotic platforms.
Live demonstration in SINTEF’s water laboratory
The day concluded with live demonstrations in SINTEF’s water laboratory, where attendees could observe underwater vehicles operating in the test basin.
A Blueye X3 equipped with the Water Linked Sonar 3D-15 successfully mapped ladders, pipes, and moving vehicles in the basin, including another Blueye X3 and a BlueROV. Visitors could also experience the Blueye system through immersive 3D goggles alongside live Sonar 3D-15 visualizations on a laptop, demonstrating the benefits of combining visual and acoustic perspectives underwater.
The demonstration showed how 3D sonar can complement visual systems and provide operators with a richer and more reliable understanding of the underwater environment. For vehicle pilots, researchers, and technology developers, this kind of situational awareness is essential for safer and more effective operations.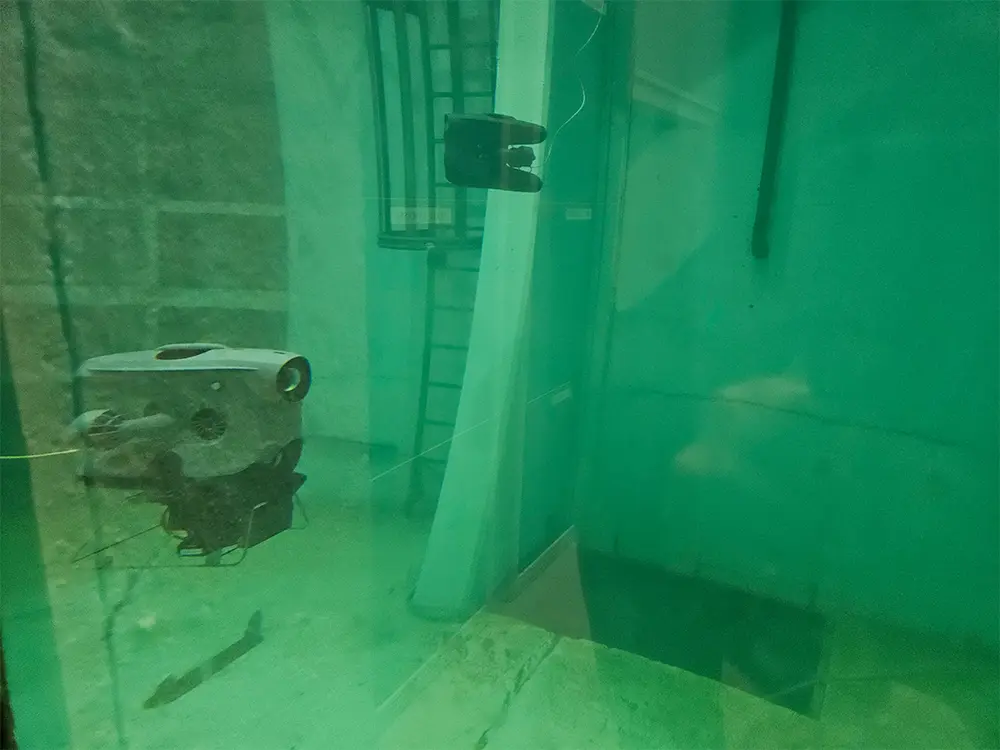
Key highlights from the workshop
The workshop was opened by Vegar Johansen, President at SINTEF Ocean, who emphasized the importance of ocean industries to Norway and the role of autonomy in supporting a more sustainable maritime future. He pointed to major investments such as the new Norwegian Ocean Technology Centre, as well as initiatives linked to SeaZero, offshore wind, sustainable seafood production, and safer maritime operations.
The academic sessions covered a broad range of topics shaping the future of marine autonomy. Kostas Alexis from NTNU presented work on autonomy across air, land, and sea, including underwater camera models, deep velocity learning, and bio-inspired sensing. Corina Barbalata from Louisiana State University focused on environmental intelligence, coastal monitoring, flood monitoring, algae detection, and decision-support systems for autonomous vehicle fleets.
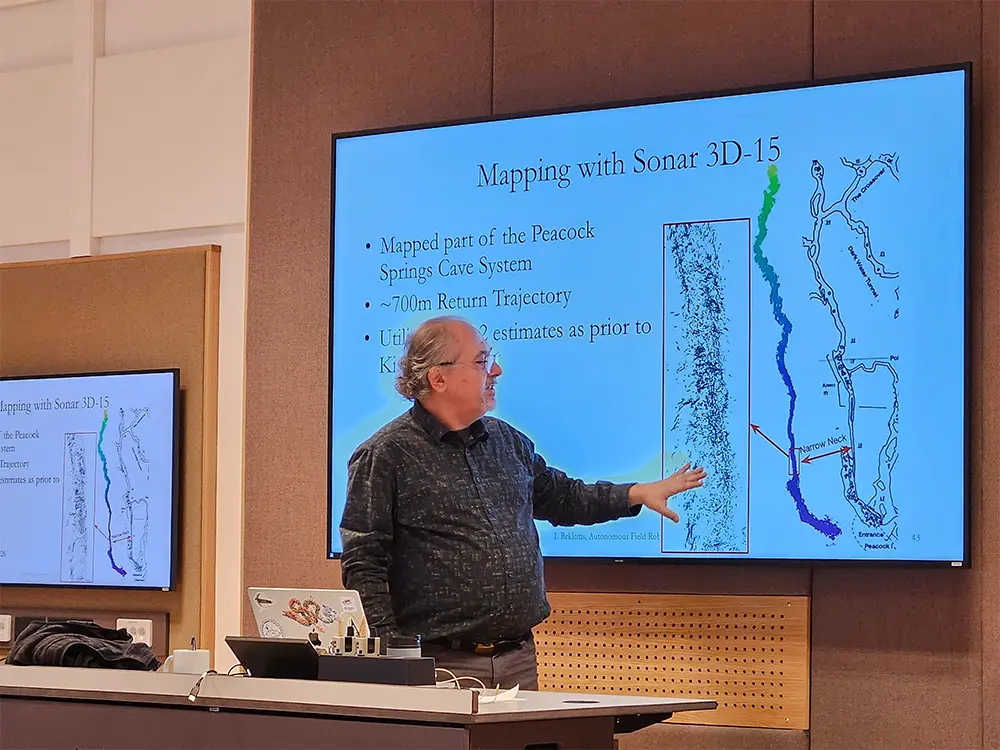
Ioannis Rekleitis from the University of Delaware shared field robotics experiences from coral reefs, shipwrecks, and underwater caves, where changing visibility and complex structures demand adaptive navigation. His presentation included examples of mapping using the Water Linked Sonar 3D-15. Ekrem Misimi from SINTEF Ocean presented advances in robotic manipulation, including tactile sensing, visual control, and practical demonstrations of physical AI in seafood handling.
The industry sessions further underlined the momentum in marine robotics. Skarv Technologies, represented by CEO Trygve Olav Fossum, presented CORAX, a coastal ROV/AUV platform for seabed mapping, monitoring, and inspection. Maritime Robotics, represented by Geir Solem, shared insights from delivering more than 250 autonomous USVs worldwide and highlighted increasing demand for multi-domain operations. Blueye Robotics, represented by Jay Nixon, International Sales Manager, introduced the newly launched Blueye X7 and presented ongoing developments in processing power, imaging, object detection, tracking, and integration between ROVs, USVs, and cloud-based operations.
A strong signal for the future of marine robotics
The International Marine Robotics and Autonomy Workshop demonstrated how quickly the marine robotics field is moving from research concepts to practical, field-ready systems.
Across the presentations and demonstrations, one message stood out: autonomy depends on reliable perception. Underwater vehicles need to understand their environment in real time, especially in conditions where cameras alone are not enough.
At Water Linked, we are focused on building compact and accessible technologies that help make this possible. The Sonar 3D-15 is part of that mission, giving marine robotic systems a clearer view below the surface and supporting more confident underwater operations.
Events like this show the value of close collaboration between research, industry, and technology developers. Together, we are helping shape the next generation of underwater autonomy.